以綠色能源為動(dòng)力核心正在逐漸成為越來越多科技產(chǎn)品的目標(biāo)。半數(shù)以上電機(jī)采用都是電力驅(qū)動(dòng),所以電機(jī)對(duì)電能的使用和轉(zhuǎn)化率覺得了對(duì)電能的消耗,設(shè)計(jì)人員必須尋找一種方式來使電機(jī)達(dá)到最高效的電力利用。
電動(dòng)機(jī)的作用就是把電能轉(zhuǎn)換成為機(jī)械能,而效率則是指產(chǎn)生的機(jī)械能與所用的電能之比。電機(jī)的振動(dòng)、發(fā)熱、噪聲和諧波屬于各種形式的損耗,要實(shí)現(xiàn)高效率,就應(yīng)減少這些能耗。那么有哪些設(shè)計(jì)技巧可供設(shè)計(jì)人員使用,以幫助他們實(shí)現(xiàn)高效率呢?
本文將介紹綜合運(yùn)用磁場(chǎng)定向控制(FOC)算法和脈沖頻率調(diào)制(PFM)嚴(yán)密地控制電機(jī),實(shí)現(xiàn)高精度與高效率。
FOC
標(biāo)量控制(或者常稱的電壓/頻率控制)是一種簡(jiǎn)單的控制方法,通過改變供電電源(電壓)和提供給定子的頻率來改變電機(jī)的扭矩和轉(zhuǎn)速。這種方法相當(dāng)簡(jiǎn)單,甚至用8/16位微處理器也能完成設(shè)計(jì)。不過,簡(jiǎn)便的設(shè)計(jì)也伴隨著最大的缺陷——缺乏穩(wěn)健可靠的控制。如果負(fù)載在高轉(zhuǎn)速下保持恒定,這種控制方法倒是足夠。但一旦負(fù)載發(fā)生變化,系統(tǒng)就不能快速響應(yīng),從而導(dǎo)致能量損失。
相比而言,F(xiàn)OC能夠提供嚴(yán)格的電機(jī)控制。這種方法旨在讓定子電流和磁場(chǎng)保持正交狀態(tài)(即成90度角),以實(shí)現(xiàn)最大扭矩。由于系統(tǒng)獲得的磁場(chǎng)相關(guān)信息是恒定的(不論是從編碼器獲得,還是在無傳感器工作狀態(tài)下的估算),它可以精確地控制定子電流,以實(shí)現(xiàn)最大機(jī)械扭矩。
一般來說FOC比較復(fù)雜,需要32位處理器和硬件加速功能。原因在于這種方法需要幾個(gè)計(jì)算密集型模塊,比如克拉克變換、帕克變換等,用于完成三維或二維坐標(biāo)系間的相互轉(zhuǎn)換,以抽取電流相對(duì)磁通的關(guān)系信息。
如圖1所示,控制電機(jī)所需考慮的輸入包括目標(biāo)扭矩指令、供電電流和轉(zhuǎn)子角。根據(jù)這些參數(shù)完成轉(zhuǎn)換和計(jì)算,計(jì)算出電力電子的新驅(qū)動(dòng)值。完成一個(gè)周期的FOC所需的時(shí)間被稱為環(huán)路時(shí)間。不出所料,環(huán)路時(shí)間越短,系統(tǒng)的響應(yīng)速度就越快。響應(yīng)速度快的系統(tǒng)意味著電機(jī)能夠迅速針對(duì)負(fù)載做出調(diào)整,在更短的時(shí)間周期內(nèi)完成誤差補(bǔ)償,從而實(shí)現(xiàn)更加順暢的電機(jī)運(yùn)行和更高的效率。
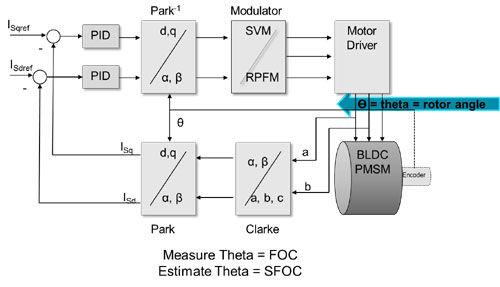
圖1:磁場(chǎng)定向控制可以嚴(yán)密地控制電機(jī)扭矩,提高效率。環(huán)路時(shí)間越短,系統(tǒng)響應(yīng)速度越快。
一般采用嵌入式處理器實(shí)現(xiàn)FOC算法,環(huán)路時(shí)間介于50us到100us之間,具體取決于模型和可用的硬件。此外,還可采用軟件來實(shí)現(xiàn)FOC,但無法保證其確定性。因此大量設(shè)計(jì)借助FPGA硬件加速,來發(fā)揮這種技術(shù)的確定性和高速處理優(yōu)勢(shì)。使用最先進(jìn)的28nm FPGA技術(shù),典型FOC電流環(huán)路時(shí)間為1.6us1,相對(duì)采用軟件方法明顯縮短。
由于加強(qiáng)電機(jī)控制不僅可降低噪聲,而且還能提升效率和精度,因此目前大部分電流環(huán)路都采用硬件來實(shí)現(xiàn),而且傾向于把速度環(huán)路和位置環(huán)路也遷移到硬件實(shí)現(xiàn)方案中。這種做法是可能的,因?yàn)殡S著數(shù)字電子電路技術(shù)的進(jìn)步,單個(gè)器件擁有足夠強(qiáng)大的運(yùn)算能力。用FPGA實(shí)現(xiàn)的速度控制環(huán)路時(shí)間和位置控制環(huán)路時(shí)間分別為3.6us1和18us1。與傳統(tǒng)軟件方法相比這是顯著的性能提升,因?yàn)閭鹘y(tǒng)的位置環(huán)路時(shí)間一般在毫秒級(jí)。